 The UAV Challenge organisers are pleased to announce that team registrations are now being accepted for the 2018 UAV Challenge Medical Express competition. Please register your teams via this online form.
The UAV Challenge organisers are pleased to announce that team registrations are now being accepted for the 2018 UAV Challenge Medical Express competition. Please register your teams via this online form.
Medical Express 2018: Rules update

The UAV Challenge Technical Committee today announced that version 2 of the rules for the 2018 UAV Challenge Medical Express competition are now available on the Medical Express Page. A full list of changes to the rules can be found on page 5 of v2 of the rules document. Changes include the introduction of an Emergency-Landing Target. The FAQ for the competition has also been updated. We hope that teams are progressing with their designs. A reminder that the Team Registration and Deliverable 1 deadline is 30th August 2017.
Australia & New Zealand Search & Rescue Conference 2017
 Today, UAV Challenge co-founder Jonathan Roberts, is giving the end of conference plenary talk at the 2017 Australia & New Zealand Search & Rescue Conference. The talk is titled “UAV Challenge – Ten Years of Finding Outback Joe”. The conference website is here: https://sar.anzdmc.com.au/. There is a great line up of speakers who all have the same desire to save as many people as possible. Thanks to all past and present UAV Challenge teams who have made our competition such a success. And thanks to the organisers of the SAR Conference for the invitation to speak.
Today, UAV Challenge co-founder Jonathan Roberts, is giving the end of conference plenary talk at the 2017 Australia & New Zealand Search & Rescue Conference. The talk is titled “UAV Challenge – Ten Years of Finding Outback Joe”. The conference website is here: https://sar.anzdmc.com.au/. There is a great line up of speakers who all have the same desire to save as many people as possible. Thanks to all past and present UAV Challenge teams who have made our competition such a success. And thanks to the organisers of the SAR Conference for the invitation to speak.
Announcing the 2017 UAV Challenge Airborne Delivery Challenge

The organisers of the UAV Challenge (CSIRO and QUT) are pleased to announce launch of the 2017 UAV Challenge Airborne Delivery Challenge. This year’s competition will follow a similar format to the 2016 event. Teams of high-school aged students are challenged to develop a system to drop a medical package to Outback Joe. There are the usual cash prizes and a rookie prize for the best team of newcomers.
All the details of the competition, plus a link to the rules document can be found on the High-School page.
Announcing the 2018 UAV Challenge Medical Express

The organisers of the UAV Challenge (CSIRO and QUT) are pleased to announce launch of the 2018 UAV Challenge Medical Express. The new competition will follow a similar format to the 2016 event, where teams must retrieve a blood sample from Outback Joe’s farm. However, this time, the focus will be on autonomy. The UAV Challenge Technical Committee strongly believe that UAVs must be far more autonomous if they are to be used to routinely save lives. The grand prize is now AUD$75,000 for the team that can complete the mission autonomously and avoid other airspace users (represented by Dynamic No Fly Zones).
All the details of the competition, plus a link to the rules document can be found on the Medical Express page.
New Delftacopter video
The team MAVLab TUDelft from the 2016 Medical Express Challenge have published a great video explaining their creation – the Delftacopter.
UAV Challenge on BBC >Click
The BBC >Click TV show about the 2016 UAV Challenge Medical Express is now available on Youtube.
Canberra UAV’s debrief
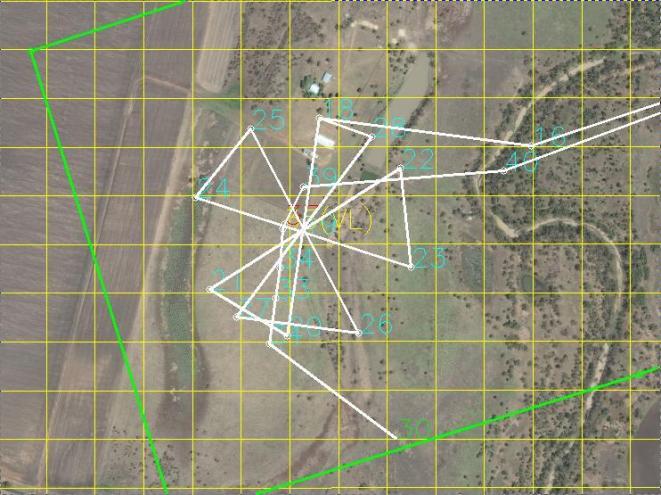
Canberra UAV’s cloverleaf search pattern (Courtesy of Canberra UAV)
If you have ten or fifteen minutes, make a cup of tea, find a nice place to sit and have a read of Canberra UAV’s write up and debrief from the recent UAV Challenge Medical Express event in Dalby. Canberra UAV came first and managed to retrieve a sample from Outback Joe. They did incredibly well and explain just how they did it here. And thanks to Canberra UAV for being so open with everything they do.
Final Day of Medical Express 2016
Previously on UAV Challenge Medical Express…

The ten teams and the organisers of the 2016 UAV Challenge Medical Express.
Yesterday we saw seven teams fly and try and retrieve Outback Joe’s blood sample. Canberra UAV managed to identify Joe, land at his farm and bring his blood sample back to the Base. Two other teams got their aircraft to the farm but crashed. MAVLab TUDelft got hung up in a tree and ISAAC UAV was so hot that flames were seen coming out of its engines as it came down. Others had a range of issues that all resulted in aircraft coming down. The final day was always predicted to be a windy and wet day and the forecast appeared somewhat accurate as rain showers popped up most of the morning. Two teams flew. ArsNumerica-Jetstream from Poland were given the first chance of the day but elected to go to the back of the queue as they were not confident of GPS accuracy and the wind was relatively strong.

Team ArsNumerica-Jetstream look at the weather and deciding to fly later.
UNSW Canberra UAV Team went next but were interrupted by the weather and patiently waited until the rain stopped and the wind dropped. They had two great looking aircraft. The retrieval aircraft was a puller-prop, skid landing gear quad plane. The support aircraft was a sleek looking pusher prop fixed wing plane. The mission time began and there were some technical issues delaying the first take-off attempt. When take-off of the quad plane occurred it seems that one of the vertical lift motors had an issue and the plane came crashing down to the ground. The support aircraft took off shortly after to do a demonstration circuit of the first section of the transit corridor to show its incredible speed and capability. But the team could not attempt a full mission given that their retrieval aircraft was badly damaged.

The two aircraft of the UNSW Canberra UAV Team
The final team to fly in the competition was ArsNumerica-Jetstream, from Poland. They elected not to attempt a full mission due to the wind speed but instead showed their retrieval aircraft performing an autonomous take-off.

ArsNumerica-Jetstream
And that left MelAvio, also from Poland. They had had a crash during testing on the day before the event and although they gallantly attempted to integrated new components into their one remaining aircraft, they could not complete the work in time. They hence did not attempt to fly.
So that was it for flying! The judges retreated to their luxurious caravan (now drained of jelly snakes and red frogs) and tallied up the scores.
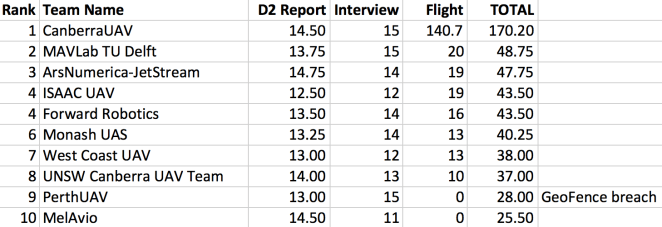
The final scores of the 2016 UAV Challenge Medical Express
Canberra UAV were clearly first on points but did not complete the Challenge as their support aircraft crashed at the farm. But they did return the blood sample and this was a massive achievement and something that the organisers had not expected in the first running of the Medical Express event. Congratulations to them.

Three members of the massive Canberra UAV team (L-R: Stephen, Jack and Tridge). A full team photo will be posted soon.
MAVLab TUDelft came second using their very new type of aircraft – the Delftacopter. They even managed to recover it from the very high tree at the end of the flying day yesterday, and so they were quite happy.
It was a fantastic few days and thanks go to all the teams and organisers (many of whom were volunteers).
A final thank you to our great sponsors. We could not do it without you!
Major supporter: Queensland Government
Platinum Sponsors: Insitu Pacific, Northrop Grumman and Lockheed Martin
Gold: Boeing
Silver: Little Ripper Lifesaver, MathWorks and CASA
Bronze: LightWare Optoelectronics, Defence Science and Technology Group, Australian Robotics & Automation Association and Western Downs Regional Council
Co-organised by Queensland University of Technology’s Australian Research Centre for Aerospace Automation and CSIRO’s Data61.
Day 2 of Medical Express 2016
Wow, what a day. The second day of the Medical Express Challenge was a huge day for both competitors and the organisers. Seven teams flew or attempted to fly the mission to retrieve a blood sample from Outback Joe who was located at Springvale Farm just outside Dalby.
The first team to fly was Forward Robotics from Canada. Their two quad planes took to the air with no problems and headed down range. It was a great start to the day. But after a few minutes and about 10km of transit, one aircraft came down and one went into a loss of comms mode where it circled continuously trying to reestablish its data link. A quick trip in a car with the remote control and the safety pilot landed the aircraft safely.

Forward Robotics about to set up (left), and the crashed first aircraft (right).
The second team up was ISAAC UAV from Kasetsart University from Thailand. Their electric helicopter made a very smooth take off and started the transit flight. The flight went very smoothly and the helicopter arrived safe and sound above the farm. They began the search for Outback Joe using their vision system. But just as they were about to turn their camera towards Joe, their helicopter started blowing smoke and a flame was observed coming out of the main motor. It appears that the motor overheated and the helicopter came down at the farm.

ISAAC UAV (left) and their downed helicopter at Outback Joe’s farm (right).
Next up was West Coast UAV from Perth. They hand launched their first aircraft with no problems and that aircraft started its transit flight. But the launch of the second aircraft did not go so well and the aircraft was slightly damaged and crossed one of the elimination boundaries. They we out and so recovered their still flying aircraft.

West Coast UAV (left) and their two aircraft (right).
Another Perth team, Perth UAV followed on after the UNSW Canberra UAV Team elected to go to the back of the queue as they were having power supply issues with one of their onboard computers. Perth UAV had a number of technical set up issues but did successfully launch their small quad plane midway through the mission flight time. The aircraft began its transmit flight but crossed the geofence at the bottom of the range after appearing to make a very wide turn. They plane came down and their UAV Challenge was over.

Perth UAV about to launch.
The only team from The Netherlands, MAVLab TUDelft were ready to show off their amazing Delftacopter – revealed to the world just last week. This new type of aircraft takes off like a helicopter and then rotates to become a biplane. The take-off was perfect and the transition to a biplane was very smooth. The delftacopter then sped off down the transmit corridor, successfully hitting waypoint after waypoint. The aircraft made it to the farm and the hunt for Outback Joe was on. The wind had picked up at the farm at it appears that the copter was slowly blown into the top of a very tall tree, where it was caught. The delftacopter’s competition debut was over.

The Delftacopter about to take off (left) and that tree (right) – copter is in the red circle.
A university team from Monash UAS drove their incredible well constructed mission command trailer out onto the field and prepared their two aircraft. The launch of their support aircraft went well and it headed along the transit corridor. But there was a problem with the take-off of the retrieval aircraft and the team could not continue.

Monash brings one of their aircraft into land.
The final flight of the day was from Canberra UAV. Many had been eagerly anticipating this flight as the team won the 2014 UAV Challenge Search and Rescue and came first in 2012. There were high expectations and Canberra UAV delivered! Their strategy was to use a large quad plane as the retrieval aircraft and a helicopter as the support aircraft and communications relay. Both aircraft took off with no issues and both transmitted to the farm, a trip of just over 20km.

The Canberra UAV helicopter (left) and the quad plane (right).
The quad plane entered its search pattern and began looking for Outback Joe. Within a few minutes, Outback Joe was found! The team reported his location which was 3m away from his true location. This was an amazing achievement. The team began to prepare for a landing. Meanwhile, the helicopter was flying above the farm to act as a communications relay. Quite unexpectedly the judges reported that the helicopter’s engine had fallen silent and the helicopter hence auto rotated to the ground – landing very hard, causing significant damage.

The Canberra UAV helicopter post auto rotation “landing”.
This incident meant that the team would not be able to fully complete the mission and hence they knew that they could not win the $50,000 prize should they score the most points and achieve all the other mission requirements. Many teams would have given up at this point, but Canberra UAV asked to continue and demonstrate how they could retrieve Outback Joe’s blood sample. Permission was granted and the landing commenced. The quad plane landed softly 42.6m from Joe after the team declared that their target landing range was 42m. The judges loaded the blood vial into the plane and pressed the go button. A minute later the aircraft ascended gracefully into the air and headed back to base. Twenty minutes later the aircraft made a vertical touchdown at the Base. The vial was retrieved and was found to be in tact. They had brought the payload home safely but did not complete the mission due to the helicopter auto rotation. But this was an epic achievement in the first running of the Medical Express competition.

Judge Jim Coyne removes the vial from the Canberra UAV quad plane after its successful return to the Base.
That was it for Day two. There are three more teams that may fly tomorrow, ArsNumerica-JetStream (Poland), UNSW Canberra UAV Team (Australia) and MelAvio (Poland). The teams and organisers will be back at the Base tomorrow morning to try and complete the flying. Will one of these three teams complete the mission and win the $50,000? We shall see. It’s not called a challenge for nothing.
